|
I am a Ph.D. student at Peking University, advised by Prof. Hao Dong. Before this, I earned my Bachelor's degree from the Harbin Institute of Technology. My current research is centered on humanoid robot learning, with a specific focus on loco-manipulation and humanoid-object interaction. I am dedicated to developing general, generalizable, and scalable learning methods, aiming to empower humanoid robots to execute a wide variety of real-world tasks with human-like capability. |

|
|
|
|
Tianshu Wu*, Xiangqi Kong*, Yue Chen*, Qize Yu, Hang Ye, Jia Li, Yizhou Wang, Hao Dong Arxiv, 2026 paper / code / project We present SUGAR, a data-driven framework that converts diverse human videos into deployable humanoid loco-manipulation skills in a scalable and generalizable manner. |
|
Tianshu Wu*, Jiyao Zhang*, Shiqian Liang*, Zhengxiao Han, Hao Dong International Conference on Robotics and Automation (ICRA), 2025 paper / code / project We present FEEPE, a foundation feature-driven online end-effector pose estimation method that is marker-free and learning-free, enabling accurate and real-time pose estimation for end-effector in complex environments. |

|
Mingjie Pan*, Jiyao Zhang*, Tianshu Wu, Yinghao Zhao, Wenlong Gao, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR), 2025, Highlight paper / project Bridging high-level reasoning and precise 3D manipulation, OmniManip uses object-centric representations to translate VLM outputs into actionable 3D constraints. A dual-loop system combines VLM-guided planning with 6D pose tracking for execution, achieving generalization in diverse robotic tasks with a zero-training manner. |
|
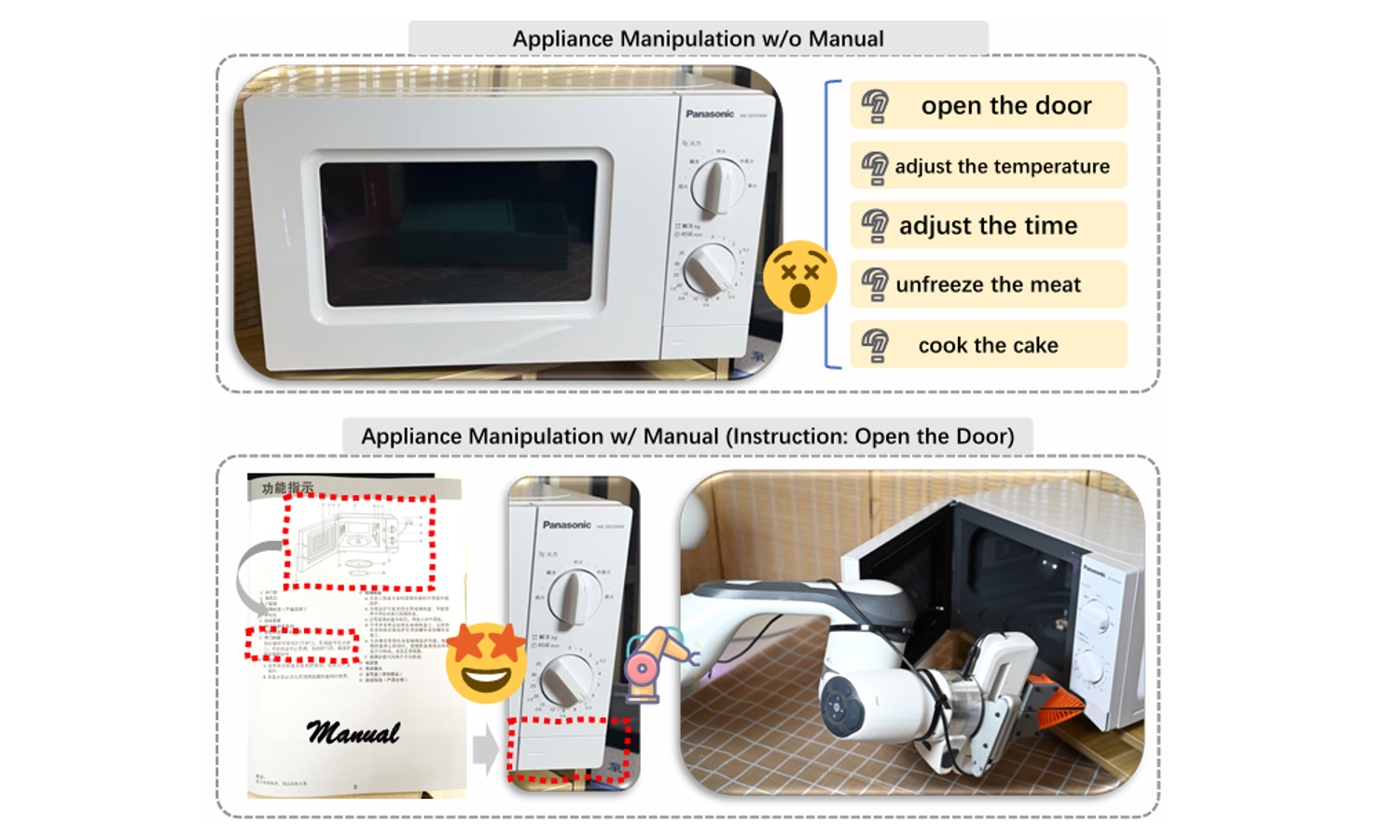
Yuxing Long, Jiyao Zhang, Mingjie Pan, Tianshu Wu, Taewhan Kim, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR), 2025, Highlight paper / code / project The first benchmark for manual-based appliance manipulation. |